
 Yahoo奇摩新聞
Yahoo奇摩新聞 這台機器人能用 Kinect 相機和神經網路送高球入洞
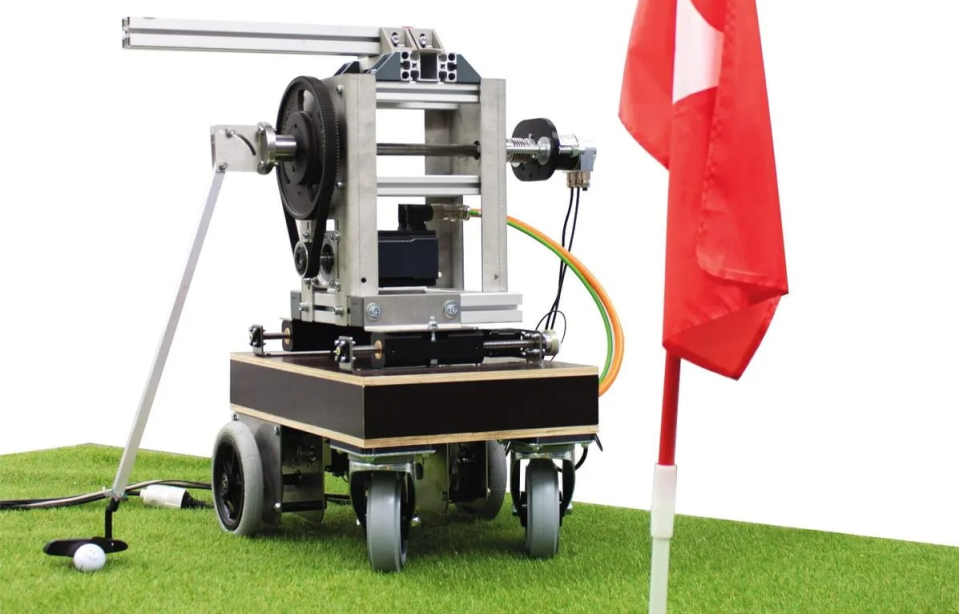
能把高爾夫球打到球道上的機器人我們不是沒有見過,但駕馭短桿就是另一回事了。德國帕德博恩大學開發出來的 Golfi 做到了這點,它可以透過神經網路來計算如何推桿,用合適的力度將球從果嶺上的任何位置送入洞中。在分析過程中 Golfi 會使用 Kinect 相機拍攝果嶺,並會結合草皮阻力、球體重量和起始速度等因素模擬數千次不同方式的擊球。按照研究者 Annika Junker 告訴 IEEE Research 的說法,Golfi 模擬擊球可能只要 5 分鐘,但這背後團隊將擊球數據輸入系統的時間則需要 30 至 40 個小時。
一旦 Golfi 確定了擊球方案,它就會去到球邊,然後用一個帶著推桿的皮帶驅動齒輪軸完成擊球。不過其成功率並非 100%,目前在實驗室中它大約有 60% 至 70% 的時間能將球擊入洞。如果在現實世界中,碰到有凹陷的果嶺或陡峭的斜坡,依賴鳥瞰系統的 Golfi 可能就會遭遇一些問題。不過根據開發團隊的計畫,Golfi 所用的技術也可被用於其他機器人應用上,高爾夫球更多只是個驗證的手段啦。
