
 Yahoo奇摩新聞
Yahoo奇摩新聞 
俄勒岡州立大學研發脫口秀機器人,全美巡演數十場獲好評
場景描述:俄勒岡州立大學的學者一直在研究,如何讓機器人掌握幽默感,並學會更好地進行脫口秀表演。為此,團隊帶著脫口秀機器人Jon 進行了數十場表演,並總結出了一些成功竅門。
關鍵詞:機器人脫口秀人機交互幽默感
在我們傳統印像中的機器人,大多數是冷酷的金屬質感,即使是Siri 一類語音助手,雖然沒有實體形象,冷冰冰的聲音也傳遞著一種機器人氣質。
有句話說,「等到人機交互與人類交流一樣自然時,真正的智能時代就來了。」
在人機交互方向上,科學家和工程師們一直在努力,也希望機器人、AI 可以獲得幽默感,以更好地與人類相處,畢竟幽默感,是人類最寶貴的特質之一。
比如Siri、微軟小冰,都在努力學習講好(leng)笑話。
讓機器人講笑話:提升人機交互的好辦法
想讓機器人或者語音助手AI ,擁有幽默感並不容易,甚至被認為是領域內的終極難題。
(我們之前已經討論過AI擁有幽默感的問題,詳見《讓人工智能學會幽默,人機對話不尷尬》。)
2019 年5 月,一個叫做「泰坦」的機器人登上脫口秀節目《笑傲江湖》的舞台。自稱是來搞笑的它,段子頻出,逗得台下觀眾捧腹大笑。
但是「泰坦」在動作和語言互動上過於真實的表現,反而引起了觀眾的質疑。而之後也證實,它確實只是一個機器人外殼,裡面藏著一個真人來操控它的動作和表演。
社交機器人發展至今,它的交互性、對人類情緒的理解,一直以來都十分具有挑戰性,像「泰坦」可能有一定配合節目需要的成分,這樣收放自如、超能接梗的機器人,在現實中還很難做到。
俄勒岡州立大學有一支研究團隊,從2011 年開始,就致力於人機交互、機器人幽默感的研究。為了解決這個難題,讓社交機器人用幽默感更好地吸引人們、更像人類,機器人學助理教授Naomi Fitter 打算從打造脫口秀機器人入手。
團隊首先選擇了軟銀機器人開發的NAO 機器人,作為載體和表演者,運行他們研發的脫口秀表演程序。
至今,Naomi Fitter 帶著她的脫口秀機器人Jon 進行了32 場西海岸巡迴演出,發現了機器人如何逐步理解和學習人類的幽默感。

32 場表演,不斷提升的演出技巧
我們知道,脫口秀一般由「開場白-抖包袱」組成,而除了笑話內容外,講笑話的語速,以及開場白和抖包袱之間的停頓時間,對於脫口秀表演也是至關重要的。
由於現階段研究方向,是讓機器人與人類的幽默互動更加自然,而不在於笑話自動生成。所以,研究人員遵循脫口秀的一般套路,為Jon 預先撰寫了適合機器人的表演素材。
這些素材都是從機器人的角度出發,主題包括人際關係、日常生活、政治、夢想和挫敗感。
比如:最近我侄子問我「機器人來自哪裡」的時候我總是很尷尬,我只能告訴它,機器人來自它的媽媽——快遞的卡車。
Jon 在表演時通過收音判斷現場觀眾的反應,來決定下一個梗是否需要停頓,還是需要加強語氣。
俄勒岡州立大學團隊剪輯的脫口秀表演花絮
研究人員撰寫了大約8 分鐘的素材,包括26 個笑話,22 個情感標籤。然後使用NAO 機器人作為表演者,來運行其喜劇表演的程序。

機器人Jon 在兩個開放麥的表演共32 場,分別在洛杉磯地區和俄勒岡州兩個開放麥場地進行。
第一項研究:停頓技巧為表演加分
第一項研究在洛杉磯地區進行,共包括22 場表演,現場有10 -20 名成年觀眾,他們之前並未看過機器人脫口秀。
機器人分別進行了兩種模式的表演。
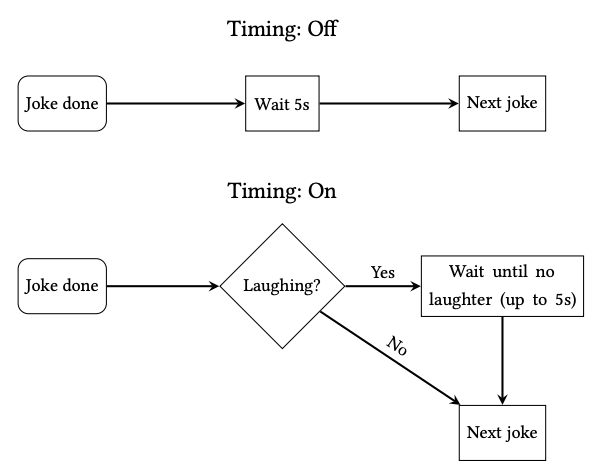
第一種模式為bad-timing(不良時機)模式:即講完每個笑話,固定地等待5 秒鐘再開始下一個。在該模式下,機器人完成了12 個笑話;
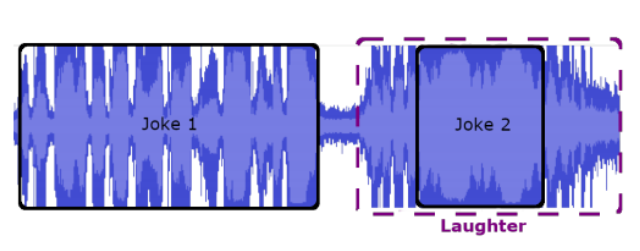
團隊用基於音量和聲音計數的兩種方法來判斷觀眾是否仍在笑和鼓掌。
然後給機器人設定了170ms 的基準等待時間,如果觀眾在此期間保持安靜,則會開始,如果一直沒有回復安靜,則會等到5 秒超時時開始下一個笑話(專家建議,通常5 秒就足夠了。)
第二種模式為appropriate timing (適當時機)模式:機器人根據現場觀眾的反應來決定暫停或繼續講。如果觀眾在笑,則暫停;觀眾恢復安靜,則繼續。在該模式下,Jon 完成了10 個笑話。
該項研究表明,若一個機器人喜劇演員的表演時機把握得好,即給觀眾適當的反應時間等,會比沒有把握好時機的機器人自顧自地進行表演要有趣得多。
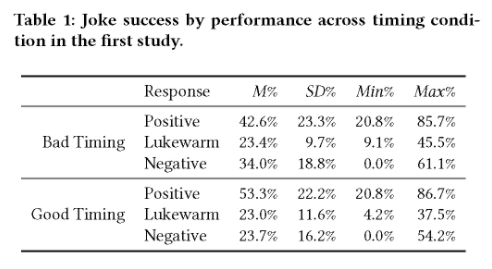
因為,當一個笑話成功的時候,觀眾經常會笑或鼓掌,但由於機器人會在固定延遲時間之後就開始下一個笑話,從而使觀眾錯過下一個笑話的一部分,導致失敗。
第二項研究:邊講邊「察言觀色」
第二項研究,是基於俄勒岡州的10 場表演。團隊將觀眾對於表演的不同響應結果考慮進去,稱為「自適應表演」。
研究團隊給笑話素材中新增了帶有標籤的笑話,標籤分為激烈,不冷不熱和沈默三種。

每當機器人講完一個笑話後,根據發出觀眾笑聲水平來選擇哪種「標籤」的笑話。在第二個研究中,所有的表演都選擇了適當的時機模式(appropriate timing)。
不過,這項研究結果顯示,是否帶標籤,對於表演的成功率影響不大。
結論:適時抖包袱,成功概率高
綜合以上研究,Fitter 總結道:「在壞時機模式(bad-timing mode)下,機器人總是在每個笑話之後等了整整5 秒鐘,不管觀眾的反應如何。
而在自適應模式(appropriate-timing mode)下,機器人會使用的時機策略在笑聲想起時暫停,並在笑聲平息後繼續進行,就像一個優秀的人類喜劇演員一樣。
因此總的來說,當笑話在適當的時機講出來時,觀眾的回應率更高。這個技巧上, Jon 已經比較輕車熟路了。
研究意義:提高機器人對人類幽默感的理解
Fitter 說,這32 場表演,為研究團隊提供了足夠的數據,以確定機器人脫口秀在不同模式之間的顯著差異。而且,這些數據可以幫助「自主社交機器人提高幽默能力」。
同時,這項研究也有助於為喜劇社交互動的關鍵問題提供一些答案。它將幫助機器人技術和AI 領域的研究人員,了解現實環境中,人類群體對娛樂化社交機器人的回應情況,也將幫助喜劇演員評估一個笑話或套路的成功與否。
在人類演員主導喜劇世界中,機器人是否會帶來變革
比如,下次表演之前,李誕、池子可以先讓機器人幫自己彩排一下,如果效果不好,再及時改進。這麼說來,脫口秀演員以後可能不需要上台表演,只在幕後專注於寫笑話就好了?
就像Jon 講的一個笑話:如果你們喜歡我,那就預定我吧!我不僅會講笑話,還能取代你們的工作
