
 Yahoo奇摩新聞
Yahoo奇摩新聞 新神經元模型有望提升人工智能性能
現代人工智能工具如ChatGPT等大多基於1960年代的神經元計算模型。然而,Flatiron研究所計算神經科學中心(CCN)的新研究表明,這種舊模型並未充分反映真實神經元的全部計算能力,可能限制了人工智能的發展。
這一新模型由CCN開發,認為單個神經元比以前想像的能對其周圍環境施加更多控制。模型開發者表示,更新的神經元模型最終可能導致更強大的人工神經網絡,更好地捕捉我們大腦的功能。
「神經科學在過去60年中取得了長足的進步,我們現在認識到先前的神經元模型相對簡單。」CCN團隊領導兼新論文的主要作者Dmitri Chklovskii說。「神經元是一個更複雜且更智能的設備。」
人工神經網絡旨在模仿人腦處理信息和做出決策的方式,但相對簡化。這些網絡由基於1960年代神經元模型的有序「節點」層構建。網絡從接收信息的輸入層節點開始,經由處理信息的中間層節點,最後由輸出層節點發送結果。
通常,只有當來自前一層節點的總輸入超過某個閾值時,節點才會將信息傳遞給下一層。在當前的人工神經網絡中,信息僅以單一方向通過節點,節點無法影響它們從鏈中早期節點接收的信息。
靈感來自神經元組成的腦迴路
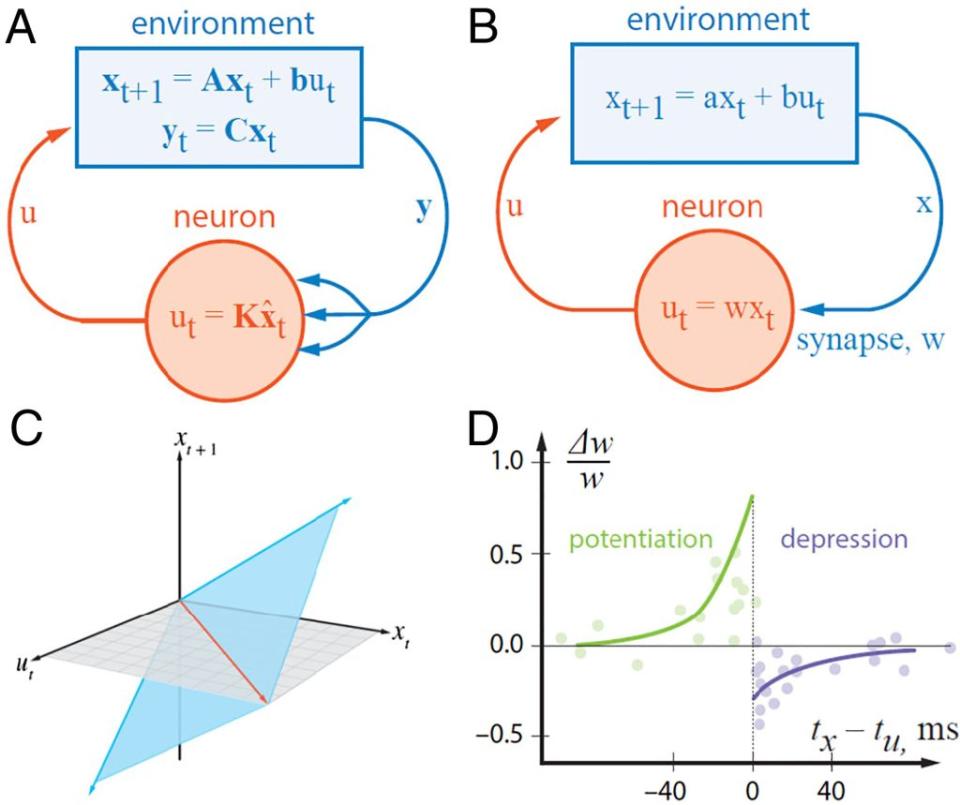
(A) 表示神經元作為閉環反饋控制器的示意圖。(B) 一個通過調整突觸權重(即控制規則中的變量)來控制的完全觀測動力系統的簡圖。(C) 觀察值和控制對(藍色平面)的有效配對子空間由先前觀察到的狀態(藍色向量)所跨越。有效動力子空間與平面相交的地方定義了控制規則(紅色線)。(D) STDP(尖峰時序依賴性可塑性):突觸權重的相對變化與突觸前和突觸後尖峰之間的時間間隔顯示了增強(因果)和抑制(反因果)窗口。(圖/PNAS)
相比之下,這一新模型將神經元視為小型「控制器」,即根據收集到的周圍信息來影響環境的設備。我們的大腦細胞不僅僅是被動的信息中繼器,它們實際上可能在控制其他神經元的狀態。
Chklovskii相信,這種更現實的神經元控制器模型可能是改善許多機器學習應用性能和效率的一大步。
「儘管AI的成就令人印象深刻,但仍有許多問題。」他說。「當前的應用可能會給出錯誤答案或出現幻覺,訓練它們需要大量能源,成本很高。人腦似乎避免了這些問題。如果我們能理解大腦是如何做到的,我們就能構建更好的AI。」
這種神經元控制器模型的靈感,來自科學家對由許多神經元組成的大規模腦迴路的理解。大多數腦迴路被認為是反饋回路,處理鏈中後面的細胞會影響鏈中早期發生的事情。就像恆溫器維持房屋或建築的溫度一樣,大腦迴路需要保持穩定,以避免過度活躍導致身體系統超負荷。
這一發現可能為我們帶來更接近人腦功能的AI技術。這項研究發表在《美國國家科學院院刊》上。
更多科學與科技新聞都可以直接上 明日科學網 http://www.tomorrowsci.com
首圖來源:Alex Eben Meyer for Simons Foundation cc By 4.0
圖片來源:PNAS cc By 4.0
參考論文:
1.The neuron as a direct data-driven controller
延伸閱讀:
