
 Yahoo奇摩新聞
Yahoo奇摩新聞 
馬斯克“獨孤求敗”的自動駕駛路徑,與特斯拉的“無人出租車”
「客觀說這是世界上最好的芯片」、「任何依賴激光雷達的人都注定失敗」、「明年年中,將有超過100 萬輛特斯拉汽車在路上使用全自動駕駛硬件,這意味著屆時將有100 萬台Robotaxi 的潛力。」經典的埃隆馬斯克再次上線。
今天特斯拉舉辦了第二屆「Autonomy Day」,正式發布了完全自動駕駛硬件(full self-driving computer,FSD 計算機)的更多完整細節,包括特斯拉首次自研的FSD 芯片硬件進展,全自動駕駛推向市場的時間表以及基於特斯拉網絡的Robotaxi 計劃。

投資人體驗特斯拉完全自動駕駛|來源Twitter@hamids
這個活動雖然主要面向投資者,但仍然有超過4 萬人通過直播視頻遠程觀看。接近三個小時的發布,特斯拉在試圖告訴現場的華爾街分析師們關於神經網絡和計算機視覺的運作優勢,希望向投資者解釋清楚「為什麼特斯拉不僅僅是一家汽車公司」。
其實這不是特斯拉第一次談論「完全自動駕駛計劃」了,但這卻是特斯拉第一次推出完整自研芯片,以及基於完全自動駕駛之後的Robotaxi(無人駕駛出租車)全新商業模式。更有Twitter 網友評論說Robotaxi 的發布類似於原版iPhone 的推出,將徹底改變行業的遊戲規則。

馬斯克接受投資者提問| 直播截圖
引來極大爭議的是,深信「第一性原理」的馬斯克再次堅定的將視覺為主的全自動駕駛方案推上舞台,這與現階段主流自動駕駛方案的使用高精度地圖與激光雷達的方案相衝突,特斯拉再一次走上了一條孤獨的路。這一次為了證明自己的路線,馬斯克的言論中不乏顛覆整個行業的激烈觀點。
馬斯克| 直播截圖
「世界上最好的芯片」
本月早些時候,特斯拉宣布新的全自動駕駛(FSD)計算機已投入生產。首先馬斯克與自動駕駛工程副總裁Pete Bannon 一起登台詳解Autopilot Hardware 3.0 的配置。
今天正在製造的所有特斯拉汽車包括Model 3/S/X 都擁有完全自動駕駛所需的硬件:8 個視覺攝像頭,12 個超聲波傳感器,雷達,以及這款定制設計的全自動駕駛雙冗餘FSD 計算機(共72W)。

馬斯克與自動駕駛工程副總裁Pete Bannon | 直播截圖
特斯拉新芯片上的神經網絡加速器可以處理來自汽車8 個不斷運行的攝像頭的每秒2100 幀的輸入圖像。這相當於每秒25 億像素。這款馬斯克口中「世界上最好的芯片」尺寸為260 平方毫米,擁有60 億晶體管,具有雙核神經網絡陣列,每秒可運行36 萬億次操作,採用14 納米工藝製造。與上一代Tesla Autopilot 硬件(由Nvidia 硬件驅動)相比,特斯拉聲稱每秒幀數處理能力提高了21 倍。曾經負責蘋果公司重要芯片項目的Bannon 還表示,他從未參與過改善倍數超過3 的項目。
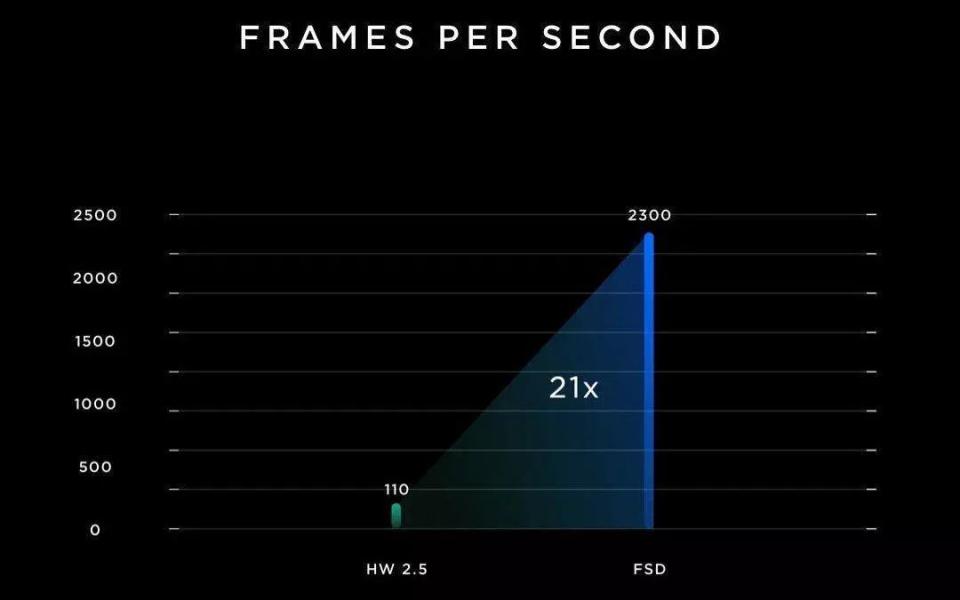
與上一代Tesla Autopilot 硬件(由Nvidia 硬件驅動)相比| 官方數據
Bannon 還解釋說與Autopilot 硬件2.5 相比,每輛車的硬件成本降低約20%。他說,主要差異在於為新硬件的開發付出的成本。
在每個全自動駕駛計算機主板實際上都配備了冗餘的兩個FSD 芯片,以及冗餘的電源,甚至是冗餘計算,「系統會將兩個處理器同時反饋給汽車之前的結果進行比較。」Bannon 說。

FSD (full self-driving computer)計算機芯片| 直播截圖
「任何一部分都可能失效,但汽車將繼續行駛,」馬斯克說。「這台計算機失敗的可能性遠低於失去意識的人,至少是低於一個數量級。」
馬斯克補充說,三星正在德克薩斯州奧斯汀生產這款新的特斯拉自研芯片,他預計供應不會有任何問題。同時他們已經在研發下一代芯片,他們預計它將比剛剛投入生產的現有芯片好三倍。馬斯克表示,特斯拉將開始為在未來幾個月購買「全自動駕駛套餐」的特斯拉車主提供翻新升級服務。
「起初看起來似乎不太可能。特斯拉,以前從未設計過芯片,怎麼會設計出世界上最好的芯片呢?但這是客觀上發生的事情。」馬斯克在Bannon 完成演講後得意的說。
「學習」人類駕駛
「Pete 告訴大家我們設計的芯片在車內運行神經網絡,而我的團隊負責培訓這些神經網絡,包括從車隊收集的所有數據,神經網絡培訓,以及然後將部分內容部署到該芯片上,」特斯拉的人工智能高級主管Andrej Karpathy 上台說。
特斯拉的AI 軟件可以監控來自汽車的大量數據,然後根據這些輸入做出駕駛決策。這可以是從車道線,道路標誌,剎車燈,行人等等。它與人類大腦每天所做的功能基本相同,將光信號轉換為具有大量模式識別功能的已知物體。
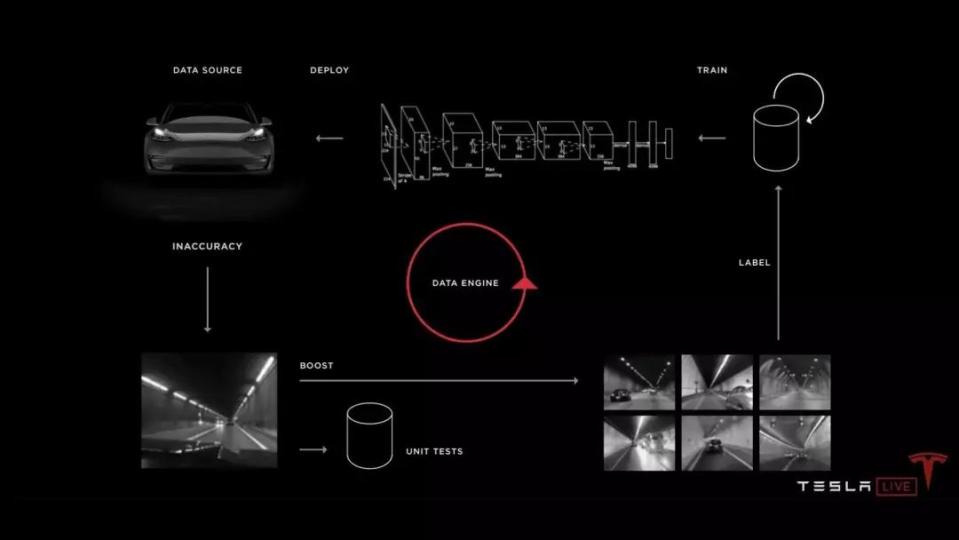
神經網絡訓練邏輯| 直播截圖
為了訓練神經網絡,計算機需要將數千個例子輸入系統,Karpathy 解釋說:「相比虛擬仿真數據,真實世界的測試數據是無可替代的。」特斯拉聲稱,在使用硬件2.0 的情況下,它有超過425000 輛汽車在上傳數據,供神經網絡使用。
「瘋狂的是, Autopilot 的神經網絡即使在視覺識別沒有很高精度的情況下同樣可以進行路徑的預測和規劃。它可能看不到這條路的拐角,它給出的建議是很可能這個彎道的角度很大, 基於此它提供了路徑預測,而且還做得很不錯。這應該都應該歸功於神經網絡/車隊從人類駕駛員身上學到的駕駛策略。」馬斯克說「是軟件學會了人類是如何在這種路況下進行駕駛的。」
更重要的是,Andrej 稱,現在的視覺為主的感知方案以及能夠適應99.999% 的場景。

適應場景| 直播截圖
「硬件都已經完成,需要做的就是改進軟件」馬斯克說。特斯拉工程副總裁Stuart Bowers 制定了特斯拉的軟件測試計劃。
依舊是介紹了特斯拉獨有的「影子模式」——無論Autopilot 是否開啟,神經網絡都在觀察和學習,以便提高Autopilot/FSD 軟件的能力。「這也是為什麼這套軟件使用起來會產生很順的操縱感,像人類一樣,比其他車企類似的產品用戶體驗要好很多。」
當「你感覺很好」時,Bowers 說,這個功能將會出現在一個受控制的部署中並發送給成千上萬的人。使用新功能的人越多,特斯拉就越了解它的工作方式。最後,當公司對這個功能充滿信心時,公司就會全面推送更新。
Bowers 表示,現在特斯拉每天都會看到10 萬次自動車道變換,並且是零事故。
能幫你「掙錢」的特斯拉
馬斯克表示,他「非常有信心」預測明年將推出Robotaxi 計劃。

Robotaxi 計劃| 直播截圖
特斯拉將不斷開發和更新該軟件,以滿足年底前實現完全自動駕駛系統所需的所有功能。他強調說,目前版本系統仍然需要駕駛員保持注意力,並不能自動駕駛,但他預計到2020 年第二季度它將不再需要駕駛員注意。
之後特斯拉將與監管機構合作,將系統批准為自動駕駛系統,不需要駕駛員監督。該時間表將取決於不同司法管轄區的監管機構,但馬斯克表示,他相信它將在明年年底前至少在一個市場被許可。
特斯拉計劃通過更新其現有的移動應用程序來啟用其Robotaxi 網約車服務網絡。

汽車共享移動應用程序| 直播截圖
在應用程序上,特斯拉車主將能夠將他們的汽車添加到共享車隊以賺錢或召喚一輛自動特斯拉車輛來接他們並將他們帶到目的地。
「今天每英里乘坐平均成本約為2 至3 美元。特斯拉估計Robotaxi 將花費不到0.18 美元。」馬斯克列舉了自己的數據,「用戶可以擁有一台Robotaxi,並允許它在特斯拉網絡上運營,每年可以獲利三萬美元。」
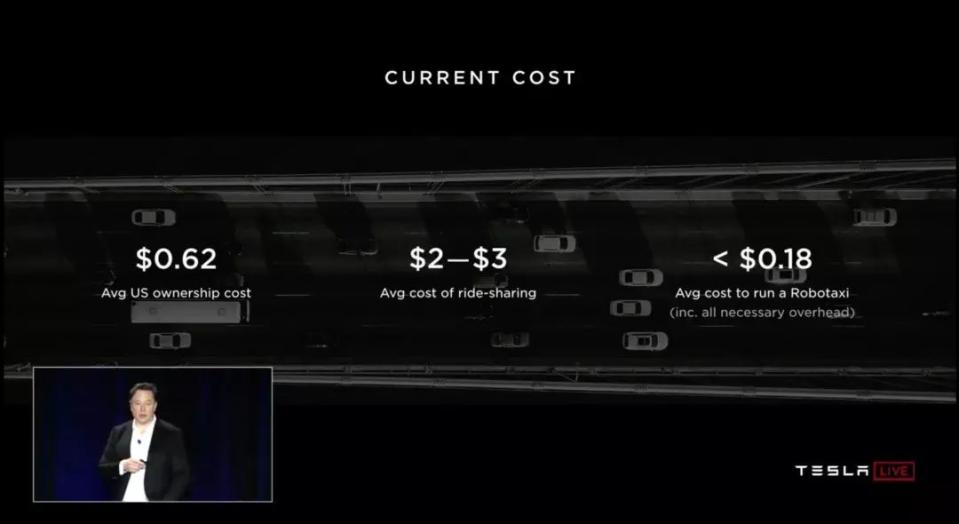
Robotaxi 費用核算| 直播截圖
馬斯克表示,任何客戶都可以在「特斯拉網絡」中添加或刪除他們的汽車,Robotaxi 更像是Uber 和Airbnb 之間的組合。與這些平台類似,特斯拉還將獲得乘車費用產生的約25-30%的收入。
更重要的是,馬斯克希望未來在沒有足夠人分享汽車的地方,將有特斯拉的自動駕駛車輛來滿足需求。
這就是馬斯克在完全自動駕駛之後的Robotaxi 計劃,如果實現這可能對共享出行行業產生的巨大的影響。「明年年中,將有超過100 萬輛特斯拉汽車在路上使用全自動駕駛硬件,這意味著屆時將有100 萬台Robotaxi 的潛力。」馬斯克說,只是實現這些遠景的前提是特斯拉先落地完全自動駕駛能力,不跳票。
特斯拉將在本週三公佈第一季度財報,不得不說馬斯克在財報發布兩天前走了一步險棋,放出了自己的完全自動駕駛底牌。馬斯克描繪了一副非常好的出行藍圖,甚至挑戰了自動駕駛的巨頭,再一次激活了「自動駕駛行業」的討論,但投資市場也許並不會對這個承諾感興趣和買單,只是一切光環又回到特斯拉,只期待馬斯克兌現諾言。
Twitter 網友推出的Elon Musk 香水——「成功的味道」| 來源Twitter
任何依賴激光雷達的人都注定失敗?
當然在所有發布之後,引來極大爭議的是馬斯克對於激光雷達的看法,深信「第一性原理」的馬斯克再次堅定的將視覺為主的全自動駕駛方案推上舞台。
另一邊像奧迪這樣的汽車製造商以及像Waymo 這樣的科技公司甚至是很多自動駕駛創業公司,目前多數自動駕駛方案的主要參與者都在開發採用激光雷達傳感器的原型,同時使用高精度地圖。
「他們慢慢地都會拋棄激光雷達, 記住我的話. 把激光雷達裝在車上真的很蠢, 它又貴又沒有必要. 就像Andrej 提到的, 一旦解決了視覺的問題, 激光雷達就變得沒有意義了. 所以你幹嘛要把一堆又貴又沒價值的東西裝到車上去。」馬斯克說,「但是我不是說激光雷達沒用, SpaceX 的火箭使用了激光雷達,用於和空間站的對接, 我只是覺得它沒必要出現在汽車上。」
針對這樣激進的觀點,我們聯繫了幾位國內的自動駕駛創業公司CEO,他們對這個觀點也式褒貶不一。「但是LiDAR 確實屬於量產的路還蠻長,相比攝像頭,LiDAR 在軟件上佔的便宜硬件上都要還回來。世界是公平的。」禾多科技CEO 倪凱評論說。
「哪種傳感器會成為自動駕駛的主要傳感器,最終只能看市場和用戶。但首先,自動駕駛的主流傳感器應該在各種條件下,保證感知的穩定和準確。這點激光雷達相較攝像頭有很大的優勢。如果我們可以坐時光機器到5 年後看看,那麼就不需要爭論了。」文遠知行CEO 韓旭說,「這個爭論讓我想起了托馬斯愛迪生和尼古拉斯特斯拉的直流電和交流電之爭:儘管愛迪生名滿天下,聲音巨大,但是由於交流電在變壓,發電和傳輸方面的技術優勢,使得當時的後輩小子特斯拉在競爭中獲勝。如果就技術本質而言,我們還是可以看到激光雷達的巨大優勢。當然,我一直對Elon Musk 很尊敬,但技術面前,事實最重要。」
發布會完整Q&A
最後,在每個環節之後,Musk、自動駕駛工程副總裁Pete Bannon、人工智能高級主管Andrej Karpathy、特斯拉工程副總裁Stuart Bowers 都接受了投資者提問。這其中有很多值得思考的觀點和問題,我們也整理出來供大家參考。
Q1: 就特斯拉FSD 芯片與英偉達Xavier 的對比來看, 前者每秒的運算速率幾乎是後者的7 倍, 就這方面的表現, 如何向投資者俱像地描述一下?
Peter Bannon:這意味著FSD 芯片每秒能夠處理的圖像幀數是Xavier 的7 倍。同樣的深度學習加速器的運行速率也會是7 倍多…這種性能的巨大差異意味著你能做很多有意思的事情, 可以讓汽車行駛得更好更安全。
Q2: 特斯拉為何放棄與英偉達的合作, 選擇自研芯片的道路?
Elon Musk: 英偉達是一家偉大的公司。但它的客戶有很多, 所以它提供的是通用的芯片解決方案。但是我們的FSD 只關心一件事, 那就是自動駕駛。所以它在這方面的性能非常棒, 同時也針對其開發了配套的軟件。我認為這樣的軟件和硬件相結合, 是所向披靡的。
Q3: 針對其他公司使用激光雷達進行自動駕駛測試, 特斯拉的看法是?
Elon Musk: 激光雷達對自動駕駛而言是徒勞無益的東西。任何依賴激光雷達的公司都可能無疾而終。激光雷達是一種又貴又沒必要的產品。就像如果人身上長了一堆闌尾。闌尾本身的存在基本是無意義的, 如果長了一堆的話, 那就太可笑了。他們慢慢地都會拋棄激光雷達, 記住我的話。把激光雷達裝在車上真的很蠢, 它又貴又沒有必要。就像Andrej 提到的, 一旦解決了視覺的問題, 激光雷達就變得沒有意義了。所以你幹嘛要把一堆又貴又沒價值的東西裝到車上去。但是我不是說激光雷達沒用, SpaceX 的火箭使用了激光雷達, 用於和空間站的對接, 我只是覺得它沒必要出現在汽車上。
Q4: 請問下一代芯片主要的設計目標是什麼?
Elon Musk: 至少要達到第一代FSD 芯片三倍的性能。
Q5: FSD 肯定是要找第三方代工的, 那麼它帶來的成本減少佔整車成本的多少?
Peter Bannon: 20%。節省下來的成本可以抵消研發的支出。當我們提出要通過自研芯片來節省成本時, Elon 說「一年如果可以賣出上千萬台車, 那這個是划算的」。
Q6: 深度神經網絡是自研還是找第三方公司開發? Fabbing 又是找誰做的?
Peter Bannon:是我們自己根據芯片定制開發的, 芯片是由三星代工的。
Q7: 我有些好奇, 從知識產權的角度出發, 你們的芯片和相關IP 設計有著怎樣的防抄襲的考慮? 你們肯定不會今後把芯片的IP 也開放出去吧?
Elon Musk: 可能3 年後會有其他公司生產類似FSD 的產品, 但兩年內我們就會研發出比現在產品好3 倍的新一代芯片。
我們的FSD 芯片是很難被破解的。如果有人能夠破解它, 甚至把神經網絡, 軟件等等其他重要的IP 設計摸了個清, 那其實他們也完全可以自研芯片。
持此之外, 特斯拉的車隊是我們強大的、能夠可持續發展的優勢。它好比谷歌的搜索引擎, 優勢在於有大量的用戶使用, 而它因為大量的使用會變得更強大。
Q8: 像Waymo/Nvidia 在自動駕駛模擬上有著自己獨特的優勢。請問特斯拉是怎麼看待在現實世界的測試和模擬測試積累的里程?
Elon Musk: 我們也有非常好的模擬系統, 但這並不能解決現實世界中存在的長尾問題。如果模擬能夠覆蓋所有的極端問題, 那隻能說我們生活在一個模擬出來的世界。現實世界是怪誕和混亂的, 你還是需要在真實世界進行道路測試才行。
Q9: 我想請問特斯拉如何解決Autopilot 的變道問題(change lane)?像在加州這樣的地方, 交通情況很糟糕, 汽車希望執行穩健安全的策略, 但是往往在實際過程中需要做一點危險的事情, 才能cut in。
Andrej Karpathy: 我在演講中提到的數據引擎(data engine), 它是在神經網絡上反復運行的。在軟件層面上我們做了同樣的事情, 我們考慮了所有與人類變道時可能採取的激進行為相關的一些變量。所以我們經常會改變「影子模式」(shadow mode) 下運行的一些變量, 來驗證算法到底工作得怎樣。當人類駕駛員在任何場景下進行變道操作時, 或者他認為目前不安全不適合變道, 這些情況下產生的數據將用來訓練機器學習分類器, 使其能夠辨別適合進行變道的路況。值得一提的是, 機器學習分類器能夠寫出比人類更好的代碼, 是因為它背後有海量的數據支持, 所以它能夠對所有正確的閾值進行調校, 保持和人類駕駛員同樣的駕駛策略。
而且無論Autopilot 是否開啟, 神經網絡都在觀察和學習, 以便提高Autopilot/FSD 軟件的能力。這也是為什麼這套軟件使用起來會產生很順的操縱感, 像人類一樣, 比其他車企類似的產品用戶體驗要好很多。
Elon: 你可能想像不到, Autopilot 的神經網絡即使在視覺識別沒有很高精度的情況下同樣可以進行路徑的預測和規劃。它可能看不到這條路的拐角, 它給出的建議是很可能這個彎道的角度很大, 基於此它提供了路徑預測, 而且還做得很不錯。這應該都應該歸功於神經網絡/車隊從人類駕駛員身上學到的駕駛策略。是軟件學會了人類是如何在這種路況下進行駕駛的。
Q10:特斯拉車隊能夠採集多大量級的數據? 冗餘方面是如何考慮的? 如何進行神經網絡的訓練?
Andrej Karpathy: 其實對訓練神經網絡有用的數據不是看量級, 而是看數據中不同的變量有多少。我們必須要選取那些有用的數據, 所以並不在乎蒐集到了多大量級的數據。
至於冗餘性, FSD 架構中包含了兩枚特斯拉自研的芯片, 都有相應的冗餘設計, 可以滿足L4/L5 自動駕駛應用。
Elon Musk: 我們的車子是在優化的計算機平台上進行推理(inference)。我們的確是有一個主要的項目在做這件事情, 叫做「Dojo Computer」, 不過今天因為時間的原因不做過多介紹。它是一台用於神經網絡訓練的超級計算機, Dojo 能夠處理大量的數據, 並且在視頻數據的基礎上進行神經網絡的訓練。當然它還需要對大量視頻數據進行無監督的訓練。
Q11: 特斯拉在自動駕駛上有怎樣的規劃?
Elon Musk: 特斯拉在自動駕駛上有三步規劃: 先完成功能, 之後在相應的功能之上實現駕駛員不用把注意力放在開車這件事情上, 之後才是說服監管者我們能達到這樣的能力。我們希望在今年完成自動駕駛功能的搭建, 從特斯拉的角度來看, 應該在明年的第二季度, 可以實現駕駛員鬆開方向盤, 看向窗外的操作。到明年底之前, 至少在某些區域獲得政府的批准, 可以在公路上實現這樣的功能操作。這是我給出的粗略的時間線。
可能對卡車而言, 編隊行駛更有可能先獲得政府相關部門的許可。如果進行長途運輸, 你可以在頭車中設置駕駛員, 其他編隊行駛的車輛都可以是完全的無人駕駛。我認為監管方對這種形式的操作會更可能早的批准。我認為監管方對特斯拉Robotaxi(Tesla Network) 的批准應該是在明年。
Q12: 要實現Robotaxi, 什麼是關鍵的技術?
Elon Musk: 為了實現自動駕駛或Robotaxi, 在硬件層面你必須要有足夠的冗餘。特斯拉的整套系統, 從硬件角度出發, 從2016 年10 月就開始針對Robotaxi 的研發, 當時我們才推出了Autopilot 2.0 版本。
Q13: 如何看待其他廠家使用激光雷達和高精度地圖在限制區域進行的Robotaxi 服務?
Elon Musk: 激光雷達和高精度地圖都是自動駕駛中錯誤的解決方案, 只會減慢自動駕駛商業化的速度。如果你只是在限制區域行駛, 那也不能叫做自動駕駛。
Q14: 目前你們的計劃是使用Model 3 實現Robotaxi 服務, 那麼Semi 卡車和Model Y 呢?
明年, 我們將把產品線擴充至Model Y 和Semi 卡車上。我們預計Robotaxi 首次運營上線是在明年, 而其他公司恐怕明年都還沒有吧?
任何顧客都可以把他們的特斯拉車子加入到Tesla Network 中來, 我認為這是一種結合了Uber 和Airbnb 的服務模式. 特斯拉將在該業務上獲得25%~30% 的利潤。如果一些地區沒有足夠來自用戶的車子, 那麼我們將提供定制的特斯拉車型用於Robotaxi 服務。
Q15: 你們有計算過Robotaxi 服務的成本嗎?
Elon Musk: 目前一輛基於Model 3 打造的Robotaxi 成本低於3.8 萬美金。我們預計隨著時間的推移, 這個數字是會減少的。現有的電池容量能夠支撐約30 萬~50 萬英里的續航。明年計劃投產的新電池組是按照百萬英里的續航進行設計的, 我們同時也在調整輪胎的設計, 進行各項優化, 以便其能夠適應對效率要求很高的Robotaxi 應用。
從某種意義上來說, 其實Robotaxi 是不需要方向盤和踏板的, 我們未來也計劃把這部分零部件去掉。可能兩年後, 我們要造一輛沒有方向盤和踏板的車型。長期來看, 三年內, 減少了一些不必要零部件的Robotaxi 成本可以控制在2.5 萬美金或者更少。而一旦Robotaxi 車隊運行起來, 特斯拉的現金流會變得非常充裕。
本文經授權發布,不代表36氪立場。
如若轉載請註明出處。來源出處:36氪
